CogMob 2023
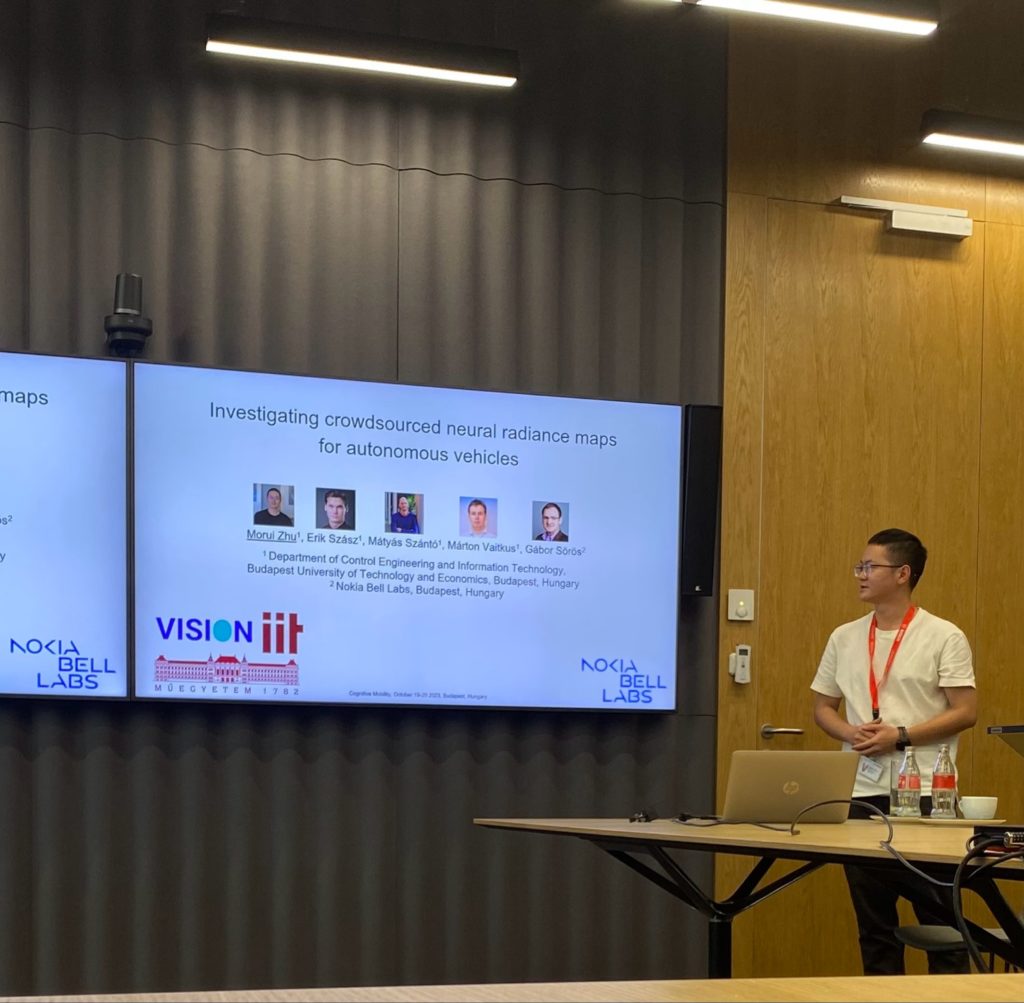
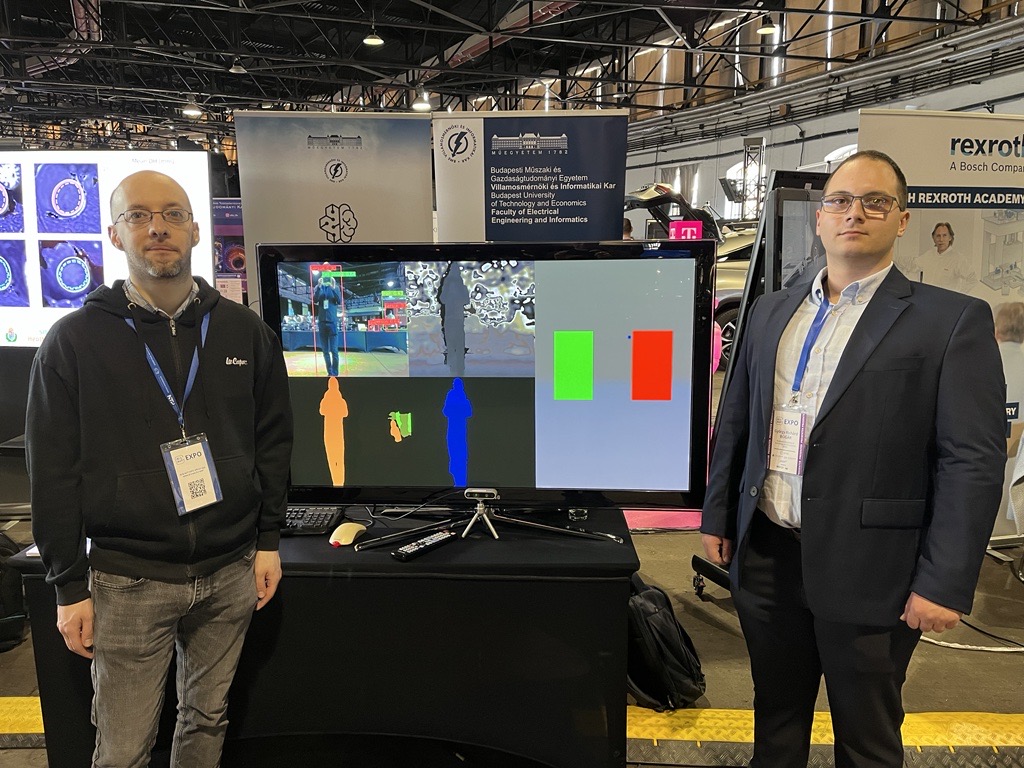
A 2023. október 19-20 között megrendezett Cognitive Mobility konferencián Zhu Morui, kutatócsoportunk MSc hallgatója prezentálta az Investigating Crowdsourced Neural Radiance Maps for Autonomous Vehicles című munkánkat. A publikációban a CARLA2NeRF struktúrát mutattunk be, mely a CARLA szimulációs környezetben létrehozott közösségi adatgyűjtési szimulációból képes neurális radiancaterek (NeRF) létrehozására, és ezen keresztül az adatszolgáltató járművek környezetének kompakt, …